Dragon Simulator 2015
Programming, Game Design, Music, Sound Design
"Dragon Simulator 2015" was my project for the Arduino Games course at Shenkar College. As the name implies, it simulates typical dragon activities: the player may fly around the endless (looping) 3D game world and breathe fire at the occasional village.
I have been interested in the notion of custom, game-specific controllers since glimpsing such arcade machines on TV, and am generally fond of games such as Taiko Drum Master and the Initial-D racing game. Mechanically these games could be played with other, more conventional controllers, but the custom controllers do much for the suspension of disbelief and make the experience far more intense. Naturally I wanted to spend my time in the Arduino course building some kind of custom controller tailored around a game that it would benefit in a similar fashion.
The game uses a custom control setup consisting of two motion sensors and a microphone hooked up through an Arduino board, and an Oculus Rift DK2 VR headset. The motion sensors track the player's arms to direct the dragon's flight, as if they were wings, the headset detects the head motion (and therefore, the aim) and the microphone (which hangs from the headset) detects the player's blowing, to allow for an immersive flying and fire-breathing interface.
This game also has a dynamic music system. I composed an original background piece for this game which is split into six synchronized tracks. The tracks are placed at different heights in 3D space and in different directions relative to the player character, but otherwise travel with them. As the player changes height and direction of flight, the tracks seamlessly fade in and out while maintaining their "compass" direction. This serves two purposes. The difference in musical texture and harmony in different heights parallels the different kind of gameplay the player may experience there, with intense brass and harpsichord riffs when the player is near ground level and probably causing havoc, and chill violin solos and electronic backing when the player is up in the clouds. The constant compass direction of each track relative to the player is also meant to ease player orientation in the looping 3D space.
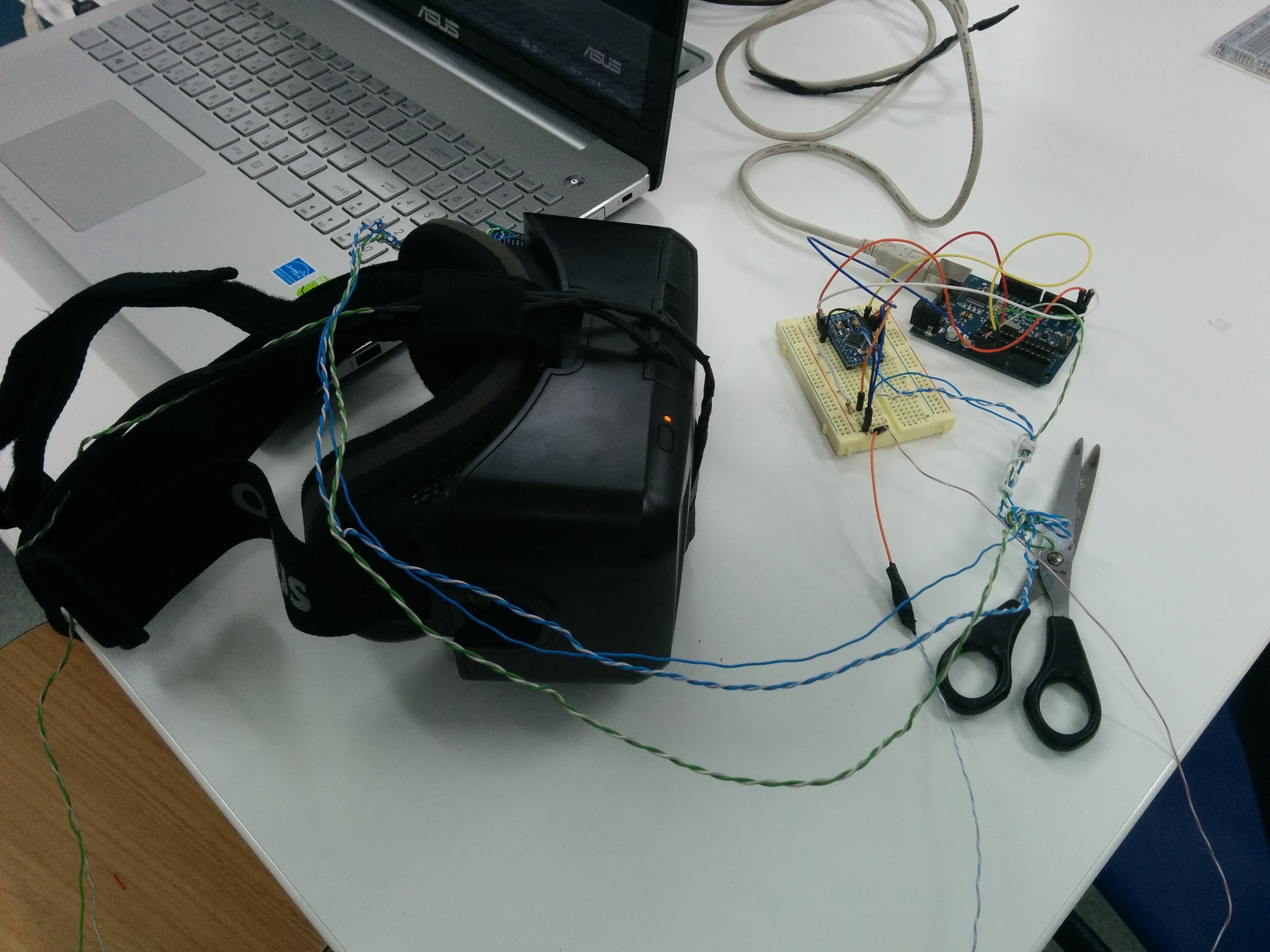

Note the microphone hanging from the headset